
02_车道线识别–选取有效区域
什么有效区域?
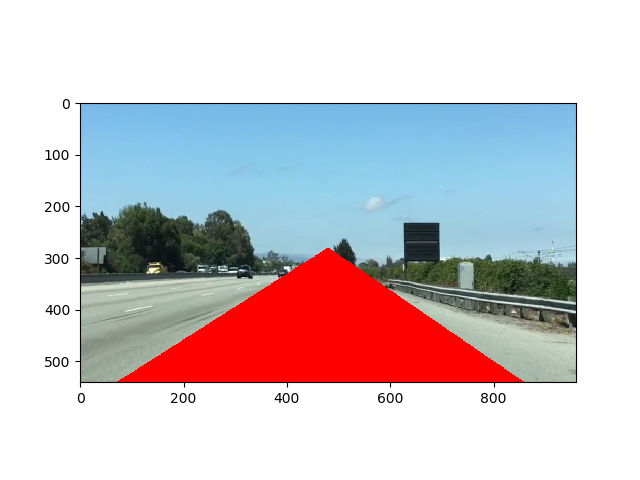
设想自动驾驶的摄像头固定在车辆前端,拍摄到的图像是固定大小的,例如:960*540;但是感兴趣的车道线不是分布在整个图像中的,而是正前方一小段区域。如果为了提取车道线,对整个图像都进行处理,一是加剧了计算单元的负担,二是没有任何收益。所以我们要让计算机只处理“有效的区域”
摄像头拍到的图像

真正感兴趣的区域

图像基础-图像的坐标
计算机存储的图像的坐标轴与我们认知中的常见的xy坐标有些差异。在计算机中以图像左上角为原始坐标[0,0],x方向为横向,y方向为纵向。转换为数组之后与数组下标相吻合,这是我们在处理计算机图像过程中首先需要注意的。
图像中的坐标系

选定区域范围
根据这个坐标,我们选定我们的感兴趣范围为一个三角形,三个顶点分别为:
左下角:[70,540]
右下角:[860,540]
上顶点:[480, 280]
也就是文章开头图像中的红色三角形区域,下面我们用代码将该区域划出来。
测试代码:
import matplotlib.pyplot as plt
import matplotlib.image as mpimg
import numpy as np
from PIL import Image
from numpy import array
# Read in the image and print out some stats
# image = mpimg.imread('ColorSelectionTest.png')
image_P = Image.open('ColorSelectionTest.jpg')
print('This image is: ',type(image_P),
'with dimensions:', image_P.size)
image=array(image_P)
# Pull out the x and y sizes and make a copy of the image
ysize = image.shape[0]
xsize = image.shape[1]
region_select = np.copy(image)
left_bottom = [70,540]
right_bottom = [860,540]
apex = [480, 280]
# Fit lines (y=Ax+B) to identify the 3 sided region of interest
# np.polyfit() returns the coefficients [A, B] of the fit
fit_left = np.polyfit((left_bottom[0], apex[0]), (left_bottom[1], apex[1]), 1)
fit_right = np.polyfit((right_bottom[0], apex[0]), (right_bottom[1], apex[1]), 1)
fit_bottom = np.polyfit((left_bottom[0], right_bottom[0]), (left_bottom[1], right_bottom[1]), 1)
# Find the region inside the lines
XX, YY = np.meshgrid(np.arange(0, xsize), np.arange(0, ysize))
region_thresholds = (YY > (XX*fit_left[0] + fit_left[1])) & \
(YY > (XX*fit_right[0] + fit_right[1])) & \
(YY < (XX*fit_bottom[0] + fit_bottom[1]))
# Color pixels red which are inside the region of interest
region_select[region_thresholds] = [255, 0, 0]
# print(region_thresholds)
# Display the image
plt.imshow(region_select)
plt.show()
测试结果
彩蛋:np.polyfit,np.meshgrid
meshgrid
为什么要meshgrid
我们分解图像的区域是通过两点之间的连接线来进行分解的,连接线为直线,在坐标轴上可以通过方程表示:
首先我们想得到的是整个图像的坐标轴,即x,y矩阵,分别代表着x轴和y轴
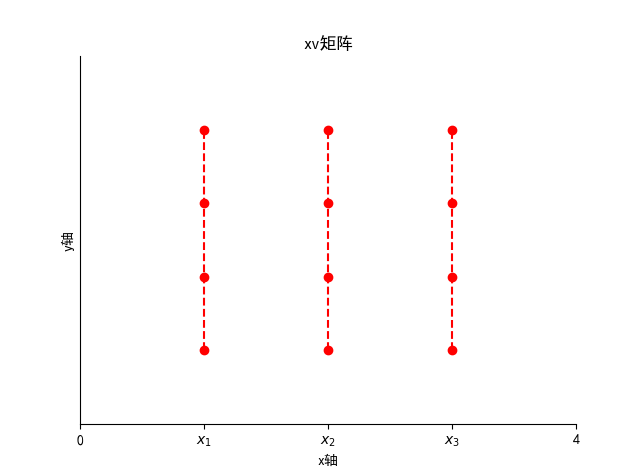
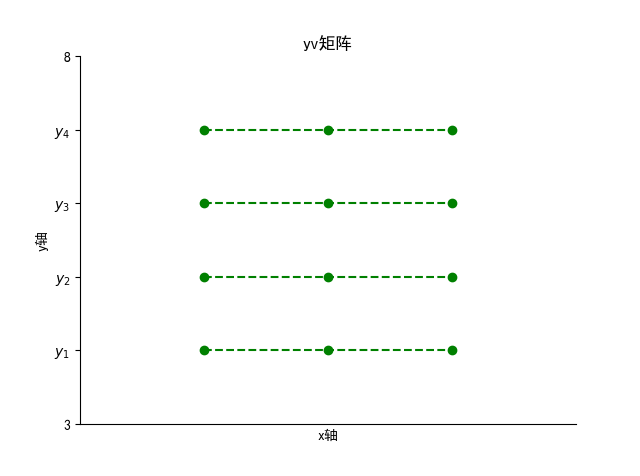
获取这个坐标轴矩阵的方法就是meshgrid
meshgrid的用法
xv,yv = meshgrid(x,y)
xv,yv = meshgrid(x)与xv,yv = meshgrid(x,x)是等同的
xv,yv,zv = meshgrid(x,y,z)生成三维数组,可用来计算三变量的函数和绘制三维立体图
上面的这些都是直接进行解包后的返回值。其实他返回的是一个list列表,列表中存放的xv,yv,zv的这些numpy数组。
import numpy as np
x = np.array([1,2,3]) #X_{x} = 3
y = np.array([4,5,6,7]) #X_{y} = 4
xv,yv = np.meshgrid( x , y )
print(xv)
print(yv)
[[1 2 3]
[1 2 3]
[1 2 3]
[1 2 3]]
[[4 4 4]
[5 5 5]
[6 6 6]
[7 7 7]]
polyfit
polyfit官方链接
为什么要polyfit
在meshgrid的章节我们讲过,直线的表示可以用y=ax+b表示,meshgrid解决了x/y,但a和b该如何得到呢?这就需要拟合函数,也就是polyfit函数了。这是一个非常强大的函数,可以拟合各种多项式,在现在这个场景中我们只需要拟合直线,也就是一次多项式
如何使用polyfit
fit_left = np.polyfit((left_bottom[0], apex[0]), (left_bottom[1], apex[1]), 1)
传入参数分别为两个点坐标,以及最后的1表示一次多项式,返回的是一个有两个参数的一维数组,分别表示a和b。
以下代码会加深大家的了解,请在jupyter中运行并调整参数
import numpy as np
from matplotlib import pyplot as plt
def linear_regression(x,y):
#y=bx+a,线性回归
num=len(x)
b=(np.sum(x*y)-num*np.mean(x)*np.mean(y))/(np.sum(x*x)-num*np.mean(x)**2)
a=np.mean(y)-b*np.mean(x)
return np.array([b,a])
def f(x):
return 2*x+1
x=np.linspace(-5,5)
y=f(x)+np.random.randn(len(x))#加入噪音
y_fit=np.polyfit(x,y,1)#一次多项式拟合,也就是线性回归
print(linear_regression(x,y))
print(y_fit)
plt.plot(x,f(x),'r',label='original')
plt.scatter(x,y,c='g',label='before_fitting')#散点图
plt.plot(x,x*y_fit[0]+y_fit[1],'b--',label='fitting')#通过polyfit获取的直线
plt.title('polyfitting')
plt.xlabel('x')
plt.ylabel('y')
plt.legend()#显示标签
plt.show()
测试结果


发表评论
Want to join the discussion?Feel free to contribute!